受動歩行を単純化したモデルとしてリムレスホイールがあります.

今回は,リムレスホイールの運動を理解するために,ポイントとなる角運動量について解説します.
質点の角運動量
まずは,質点の場合の角運動量の定義の確認です.

上の図のように,運動量をもつ質点の原点Oまわりの角運動量
は,質点の位置ベクトルを
として,
で与えられます.この式のは外積を表しています.
角運動量の大きさ
は,
と
を隣り合う2辺とする平行四辺形の面積になります.

平行四辺形の面積は「底辺かける高さ」なので,上の図のように運動量ベクトルと平行な2直線の距離をとすれば,角運動量の大きさ
は,
になります.この距離を考えると,角運動量の大きさの計算は簡単です.
角運動量の向きは,右ネジが進む回転方向になります.昔,私が工事現場で働きはじめたとき,ネジの構造を知らなかったので,回す方向が分からず,バカにされました.ネジは右に回すと締まるのは世界の常識です.逆ネジは特別な用途のみに使われるネジです.工事現場での仕事は非常に勉強になりました.

並進運動でも角運動量は保存
回ってなくても,運動量があれば任意の点における角運動量は保存します.並進運動でも,角運動量が存在していることを忘れないでください.回転軸が固定されれば,その軸まわりの角運動量を考えてください.
ここでは例として,下の図のように,無重力中を並進運動する円盤 (奥行きのある円柱)を考えます.この円盤は,点Aに衝突し,その後,点Aを回転軸として回転運動をはじめるとします.
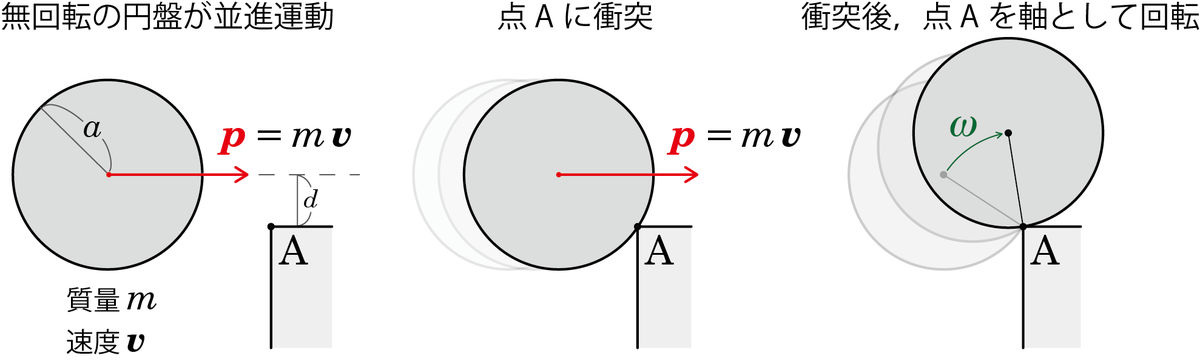
上の状況では点Aにぶつかる直前まで,円盤は回転していません.回転していなくても,点Aまわりの角運動量は存在し,保存しています.位置ベクトルと運動量ベクトルを描いた下の図を見てください.

角運動量の大きさは,位置ベクトルと運動量ベクトルが作る平行四辺形の面積なので,上の図の下のように面積は変わらず一定になることが分かります.
点Aに衝突した後は,この角運動量が点Aまわりの回転運動の角運動量になります.下の図のように,衝突後の点Aまわりの角速度を求めてみてください.

回転の軸が変わっても角運動量は保存
下の図のように,回転の軸が突然変わる状況を考えてみます.

ポイントは,回転軸が変わっても角運動量は保存するということです.私はアホなので,昔は,何で保存するのか理解できていない時期がありました.上の図の状況を考えて,角運動量を計算して,保存することを確認してみます.
計算の流れは,円盤を微小部分に分けて,各微小部分の角運動量を求め,それを円盤全体で積分します.
下の図のように,微小部分について,運動量ベクトルと平行な直線を回転軸を通るようにとり,運動量ベクトルと平行な2つの直線 (下図の破線)の距離を考えれば,角運動量の大きさが計算できます.

円盤の質量を,半径を
とすれば,円盤の面密度
は,
です.
まず,微小部分について点Oまわりの角運動量の大きさを計算します.角運動量は,「(2本の平行線の距離)かける(密度)かける(面積)かける(速さ)」なので,
円盤全体では,円盤の半径をとして,
円盤の慣性モーメントが,
になることが分かるので,これで正しいと思います.
次に,回転の中心を点Aに変更した瞬間を考えてみます.角運動量は,「(2本の平行線の距離)かける(密度)かける(面積)かける(速さ)」なので,変わるのは,2本の平行線の距離の部分です.上の図の右のように考えれば,2本の平行線の距離は,になることが分かります.微小部分について点Aまわりの角運動量の大きさ
は,
最右辺の第1項は,点Oまわりの計算と同じなので,第2項の積分が0になれば,回転軸が変わっても角運動量が変わらないことになります.ということで,第2項のみを考えて,
になることを確かめてください.
まとめ
今回のポイントが理解できれば,リムレスホイールの運動も理解できると思います.